Our relationship with technology is in constant change. A developing feedback loop that in many ways resembles a "conversation" between the two species: Us and the Machines.
Conversation always raises the question of language. And language as a medium-specific phenomenon, leads to the process of "Translation" !
However, the essence of communication relies on the quality and form of the not only the translational process but also the mediator who converts the data!
Just like in the game "Chinese whispers" the communicated object adapts to the subject's interpretations of it throughout each interaction! Lost in translation becomes the interesting playground where two inherently different species try to communicate like a human and a robotic arm.
project date
2019-2020
project type
Master Thesis
course
Advanced Architectural Design
University
Staedelschule, Frankfurt am Main
I like to think (and the sooner the better!) of a cybernetic meadow where mammals and computers live together in mutually programming harmony like pure water touching clear sky.
I like to think (right now, please!) of a cybernetic forest filled with pines and electronics where deer stroll peacefully past computers as if they were flowers with spinning blossoms.
I like to think (it has to be!) of a cybernetic ecology where we are free of our labors and joined back to nature, returned to our mammal brothers and sisters, and all watched over by machines of loving grace.
A Poem by Richard Brautigan in 1967 an enthusiastic description of a utopia in which machines & living beings are not only refusing to be a threat to one another, but also co-existing together to create a better world.
The same paradigm that inspired these sets of experiments for my project. Exploring and creating ways of communication between Human And Machine!
Sets of experiments for communication based on their setup logic :
The basic interface for communicating motion
The basic interface with an analog capture on canvas
The basic interface with an analog Light painting
The Extended Loop: The interface for communicating a hand motion to Robot nr.1 and communicating the motion of Robot nr.1 to Robot nr.2.
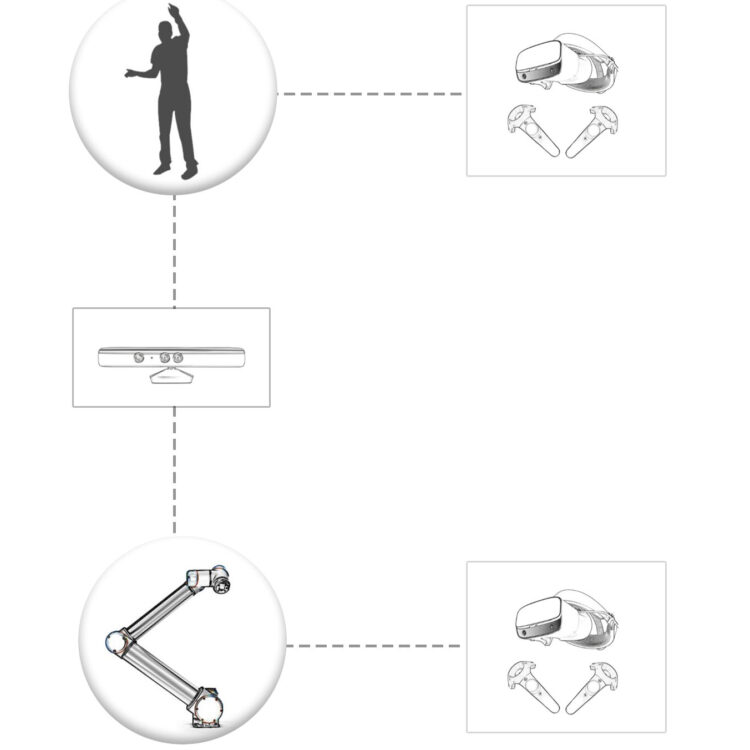
The basic interface with 3D capture in VR
The interface for communicating the motion of each hand to 2 Robotic arms.
Using experiment number 4, as an “Apparatus” for Architectural drawing.
Imitation as a method of familiarizing oneself with a new context
What happens when we observe an unknown being, unfamiliar and even alien, imitating our moves? Does it show it’s flattery for us? Does the familiarity of our own movements, bring us closer to trusting grounds?
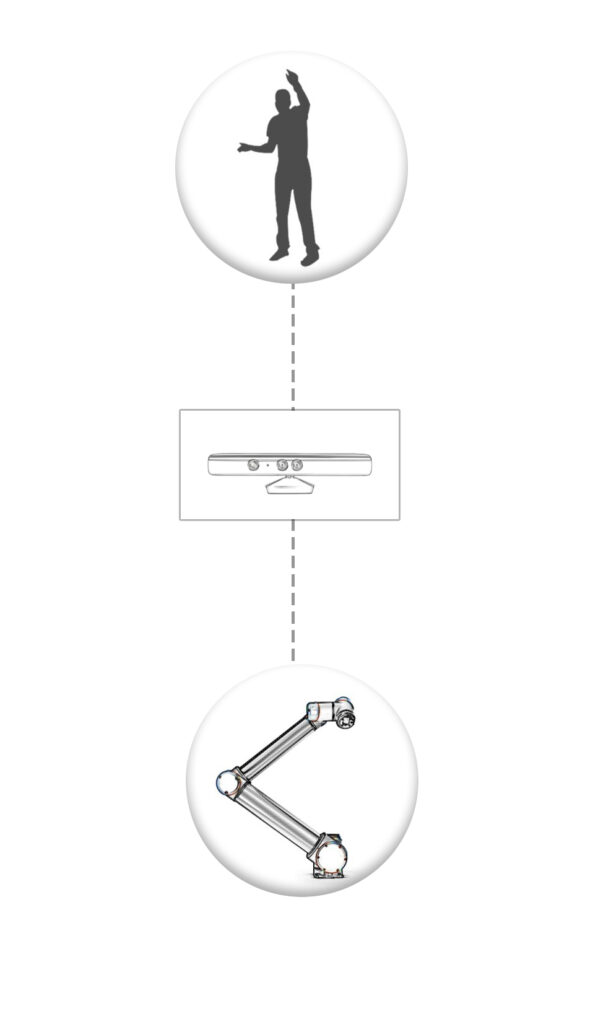
1. Interface for motion communication
Setting up a kinect to track the hand position in space and translating it for the robot as target coordinations.
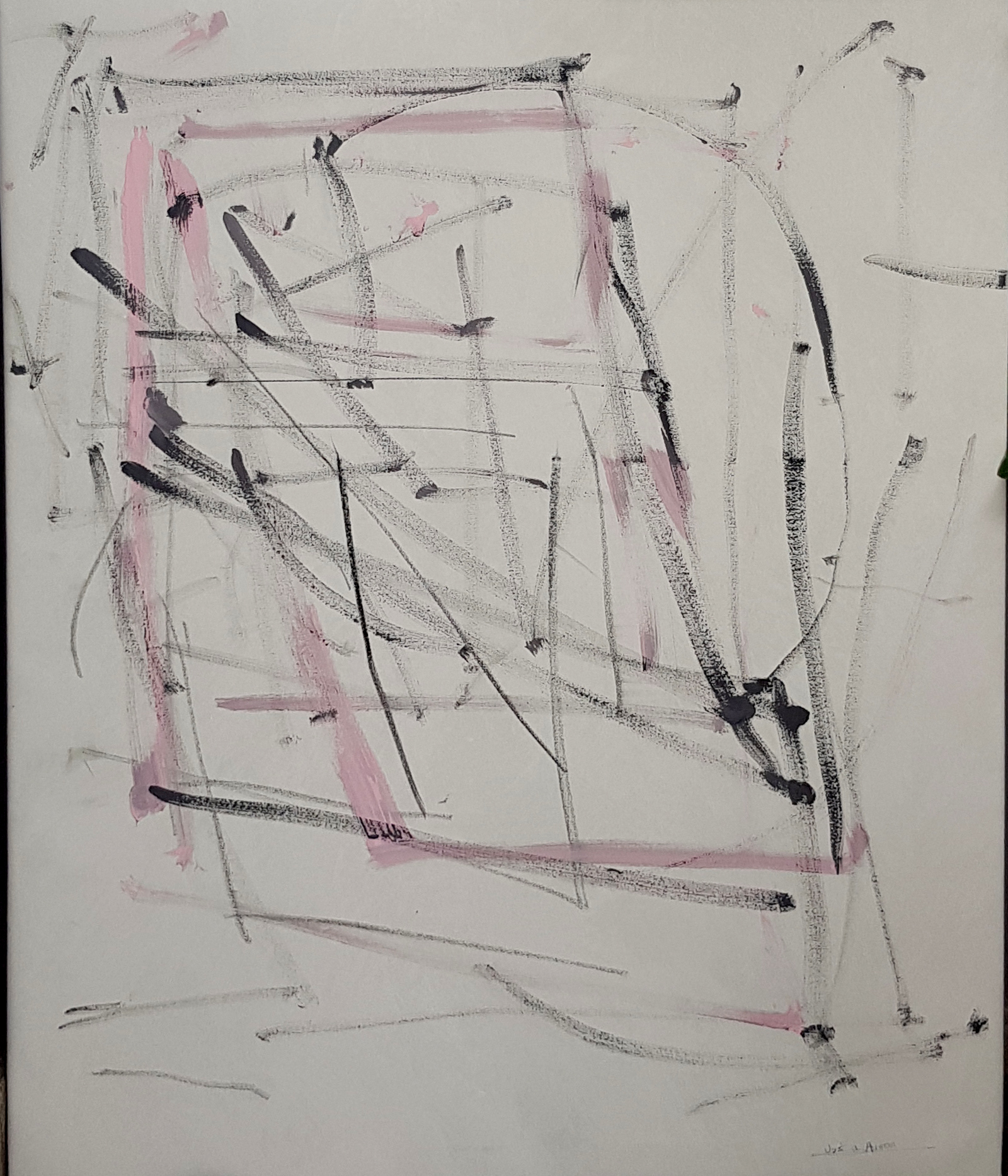
2. Interface for motion communication and a canvas to capture the motion-Trace
Using the setup for a drawing performance with the robot.Capturing my hand motion while drawing and letting the robot UR5, read the data and interpret it in his own coordination system, and imitating my drawing in parallel. This is where the robot is not only an industrial tool but also enabled as an actor in a performance.
Result of my drawing
Result of the Robot's drawing
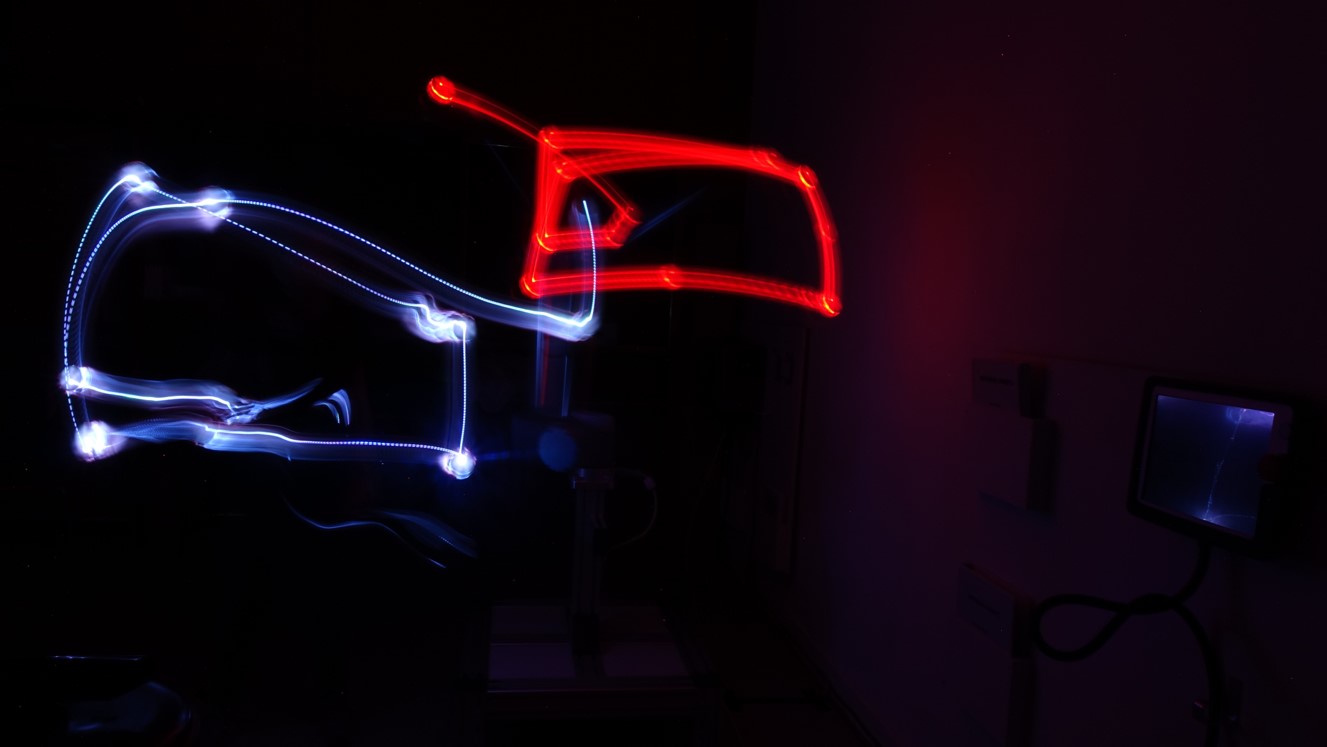
3. Interface for motion communication and converting it to Light-Drawing
Light painting or using a spatial light capture as a 3D canvas, was the next experiment for drawing with the Robot. The Blue traces are the consequence of my hand motions and the Red ones are the Robotarm’s.
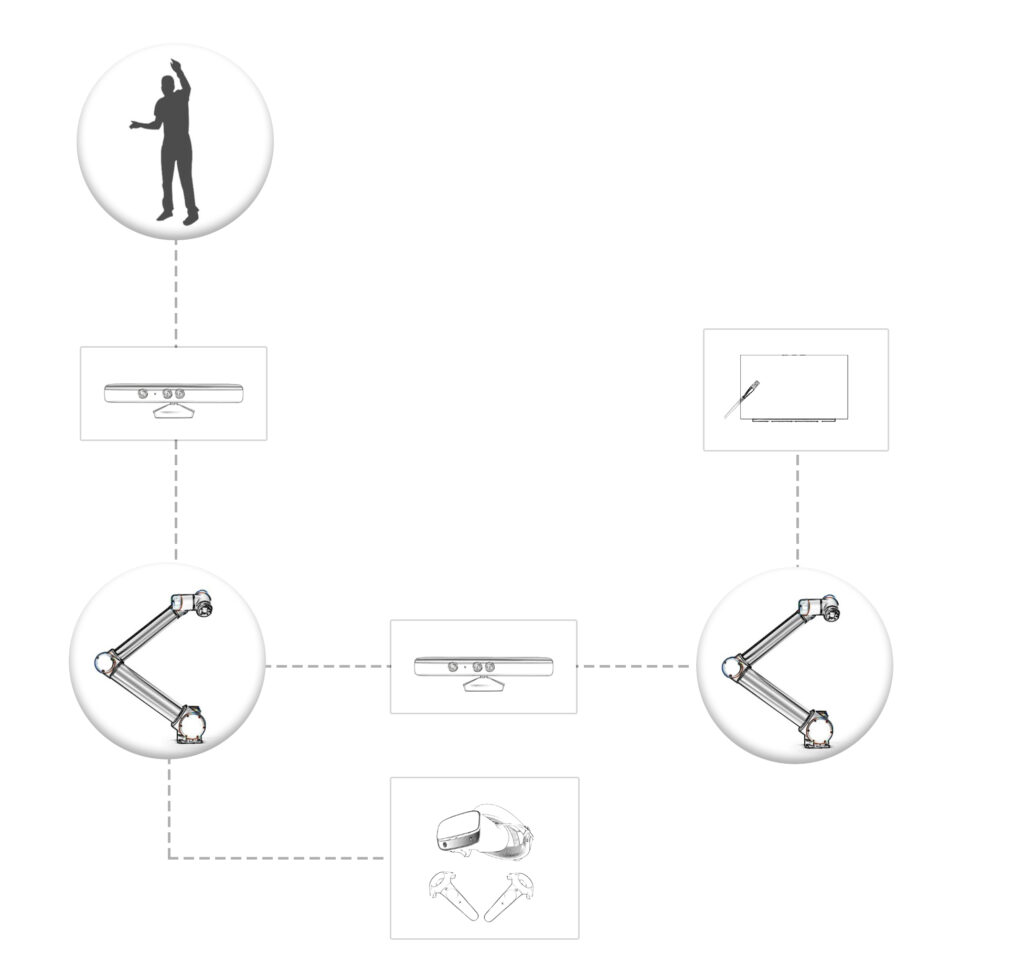
4.The Extended Loop:
The interface for communicating a hand motion to Robot nr.1 and communicating the motion of Robot nr.1 to Robot nr.2.
This stage of my experiment was an interactive installation as an exhibition piece in the Open-Studio exhibition (Rundgang) of Staedelschule 2020 open to public to interact with.
The extended loop used two kinects, two robotic arms, a vr drawing projected on the wall and a glass canvas. The loop started with the interactor (human) and goes to the small robot (UR5) through kinect. The UR5 draws while moving and it is also being captured by the second kinect and translated for the second robot (UR10). The second robot imitates the smaller robot that was imitating the human! And while doing so, he draws on the glass canvas facing the human. A false mirror of movement! a lost in translation! A Telephone game in motion.
5. Interface for motion communication with 3D drawings in VR
Once the interface and the data-type (hand to target coordination) was established, the experiments got deeper into the language system. Researching the way the robot reads the data and connects the dots – literally speaking!
The experiments here were divided into 3 kinds based on the robot movement type shown in the diagram, to explore the “loss” of translation in different modes. In order to capture the input and output of the interaction in a more visually accurate way, the VR 3D drawing apps were used. Through this pipeline, the object drawn by my motion and the object drawn by the robot’s motion were juxtaposed and shown.